
Research and Publications
2025
Cybernaut: Towards Reliable Web Automation
Hengyue Liang, et al.
Accepted to KDD 2025 Workshop
A Baseline Method for Removing Invisible Image Watermarks using Deep Image Prior
Hengyue Liang, et al.
Accepted to Transactions on Machine Learning Research (TMLR), 2025
2024
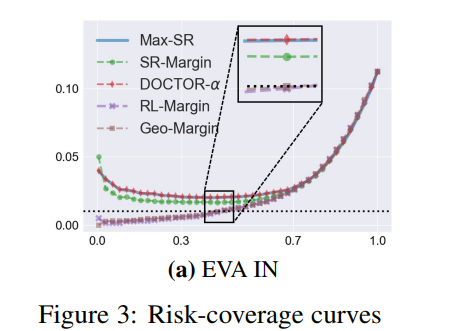
Selective Classification Under Distribution Shifts
Hengyue Liang, Le Peng, Ju Sun
Accepted to Transactions on Machine Learning Research (TMLR), 2024
2023
Rethinking Transfer Learning for Medical Image Classification
Le Peng, Hengyue Liang, Taihui Li, Ju Sun
Accepted to British Machine Vision Conference (BMVC), 2023 (Oral)

Automated Quantification of Eye Tics using Computer Vision and Deep Learning Techniques
Christine Conelea, Hengyue Liang, Megan DuBois, Brittany Raab, Mia Kellman, Brianna Wellen, Suma Jacob, Sonya Wang, Ju Sun and Kelvin Lim
Under review for “Movement Disorders”, the official Journal of Movement Disorder Society (MDS), MDS-23-0240.R1
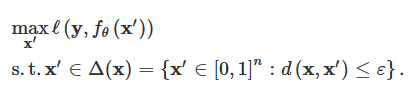
Optimization and Optimizers for Adversarial Robustness
Hengyue Liang, Buyun Liang, Le Peng, Ying Cui, Tim Mitchell, Ju Sun
In preparation for “International Journal of Computer Vision” (IJCV)
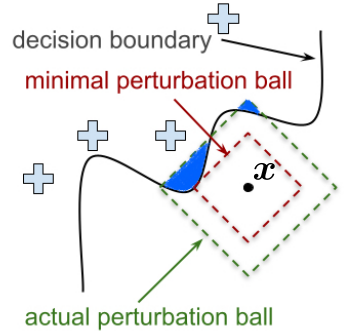
Implications of Solution Patterns on Adversarial Robustness
Hengyue Liang, Buyun Liang, Ying Cui, Tim Mitchell, Ju Sun
Accepted to “Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition” (CVPR 2023, workshop of adversarial machine learning)
2022
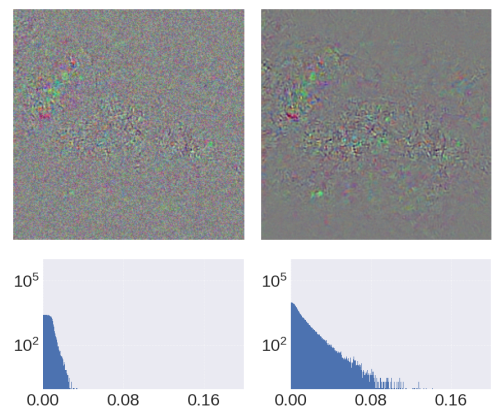
Optimization for Robustness Evaluation beyond ℓp Metrics
Hengyue Liang, Buyun Liang, Ying Cui, Tim Mitchell, Ju Sun
Accepted to “2023 IEEE International Conference on Acoustics, Speech, and Signal Processing” (ICASSP)
2021
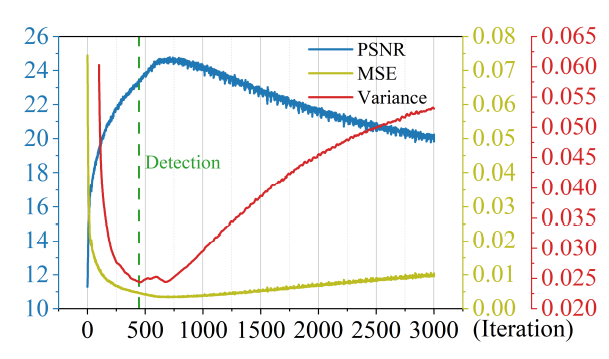
Early Stopping for Deep Image Prior
Hengkang Wang, Taihui Li, Zhong Zhuang, Tiancong Chen, Hengyue Liang, Ju Sun
Accepted to Transactions on Machine Learning Research (TMLR), 2023
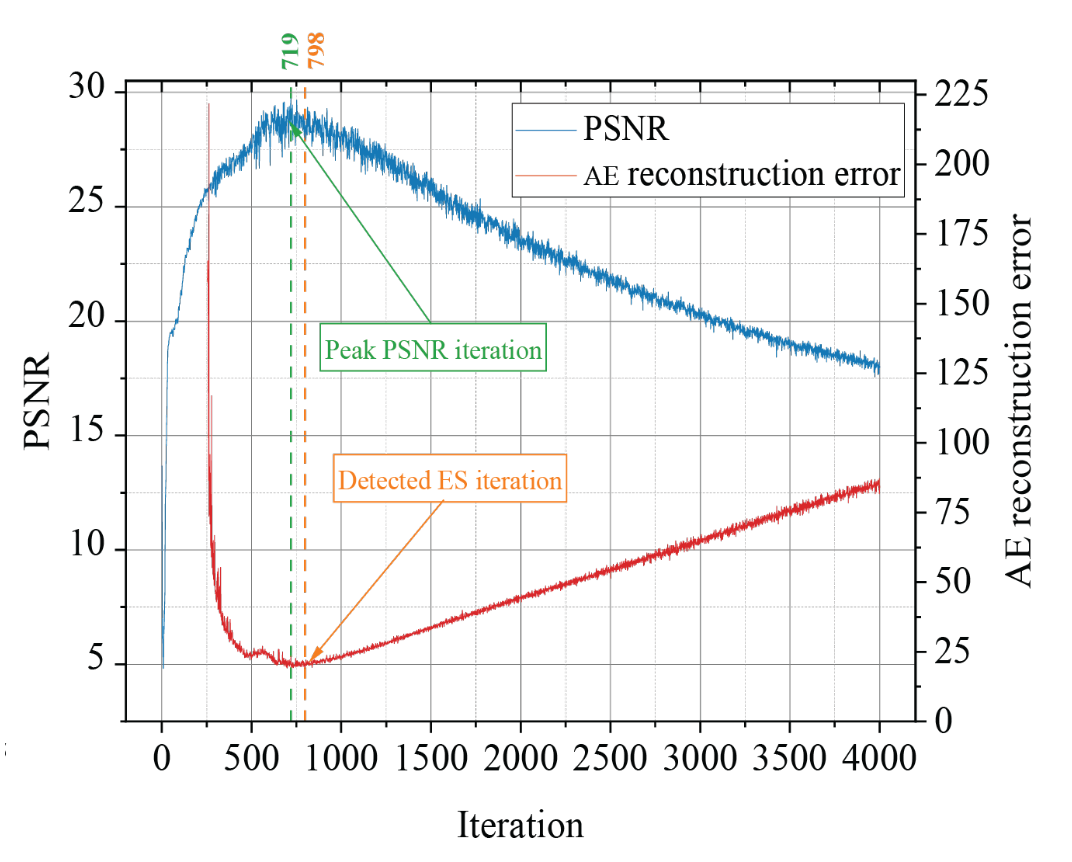
Self-Validation: Early Stopping for Single-Instance Deep Generative Priors
Taihui Li, Zhong Zhuang, Hengyue Liang, Le Peng, Hengkang Wang, Ju Sun
Accepted to British Machine Vision Conference (BMVC) 2021
2020
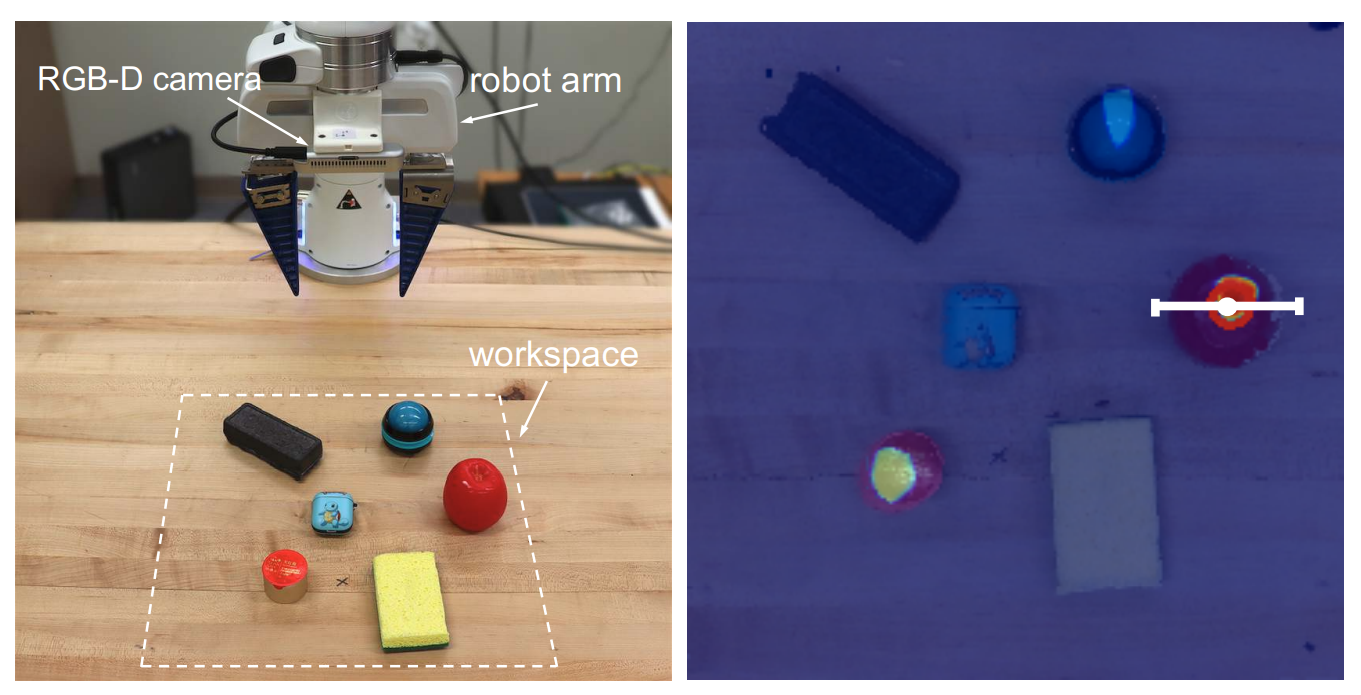
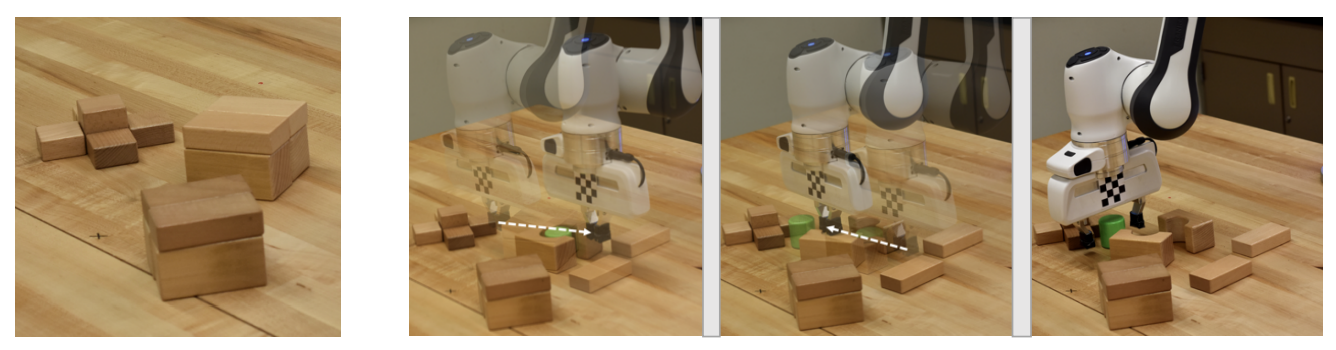
Learning Visual Affordances with Target-Orientated Deep Q-Network to Grasp Objects by Harnessing Environmental Fixtures
Hengyue Liang, Xibai Lou, Yang Yang, Changhyun Choi
Accepted to IEEE International Conference on Robotics and Automation (ICRA) 2021, Xi'an
Attribute-Based Robotic Grasping with One-Grasp Adaptation
Yang Yang, Yuanhao Liu, Hengyue Liang, Xibai Lou and Changhyun Choi
Accepted to IEEE International Conference on Robotics and Automation (ICRA) 2021, Xi'an
2019
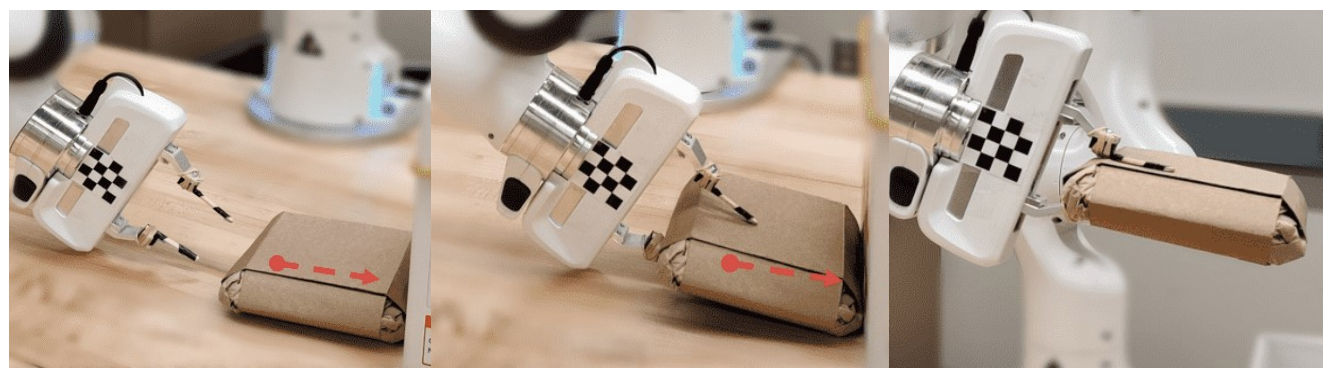
A Deep Learning Approach to Grasping the Invisible
Yang Yang, Hengyue Liang and Changhyun Choi
Accepted to IEEE Robotics and Automation Letters (RA-L) 2020